

 联系我们
联系我们

2. 问题一其实就是机器人运动学正解问题,即通过a1-a6角度值,计算对应的末端工具(此处举例法兰盘)坐标值(XYZ ABC)
3. 对于空间一个位姿(位置XYZ,姿态ABC)可以通过位姿矩阵表示
4.之前介绍过,机器人运动学模型可以通过多种方法构建,比如*常见的DH参数建模法
5. 之前介绍过如何获取ABB机器人DH 参数
6.此处举例IRB120机器人。
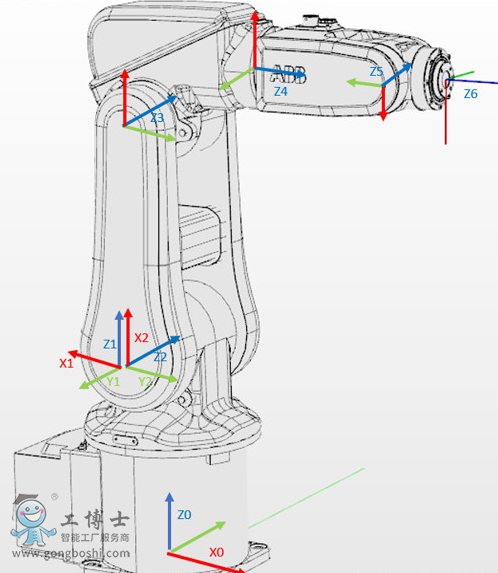
7. 通常机器人建模如上图,建立Base坐标系(X0Y0Z0),之后依次对应1轴到6轴6个坐标系(x1y1z1….x6y6z6),通过DH参数来表示这6个动坐标系相对于前一个坐标系的关系(T1-T6)
8.对于DH参数,旋转和平移顺序如下:即先绕当前x轴旋转α度,再沿新的x轴平移a,再绕新的Z轴旋转θ度,再沿新的Z轴平移d
9. 故按照上式定义计算后整理,可以得到基于DH参数的位姿矩阵
10. 注意到IRB120参数中,首先出现一个KinematicBaseFrame s,值不为0,且坐标系绕大地坐标系的Z轴旋转180度,而KinematicBaseFrame s和1轴之间数据为0,故此处我们直接用KinematicBaseFrame s的值表示坐标系0到坐标系1的变换T01
进行机器人运动正解计算,代码先获取当前机器人各关节位置,并计算,计算后结果与机器人自身显示相同,证明计算过程正确。
了解相关资讯请点击:ABB机器人配件
本文摘自:网络 日期:2020-03-06
