

 联系我们
联系我们

2. 机器人前进轨迹不希望中断(即不希望机器人准确走到Target_20停止再判断信号),以提高节拍。
3. 若采用如下代码
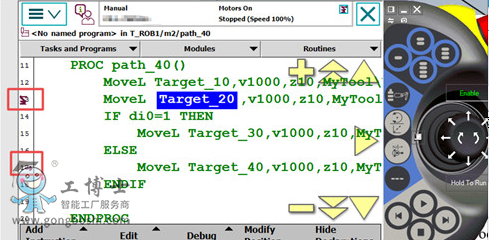
则有可能由于机器人预读机制,机器人在刚执行13行代码时(机器人刚开始从Target_10往Target_20运动),光标已经预读,此时由于信号di0还没有产生,机器人光标判断14行代码无效,光标直接预读至17行
4. 若采用如下代码,则机器人会在13行等待机器人运行完毕再往下执行,机器人动作准确,但机器人会在Target_20点停止。
5. 实际希望机器人在行进时在Target_20前20mm位置处判断信号为1,机器人会在Target_20处以z10效果圆滑过去,而不会走到Target_20点。
6. 可以利用TriggInt,配合TriggL来实现,即在目标点前几mm处触发中断,中断内机器人判断信号并修改标志位,TriggL下一句判断标志位后继续运动。整个运动过程中,转弯半径不使用fine,以避免机器人停止。
了解更多内容请点击:ABB机器人配件
本文摘自:网络 日期:2020-03-12
- 下一篇:自定义HMI--运行程序控件
- 上一篇:计算输送链跟踪两次来料距离
