

 联系我们
联系我们


2.可以利用自动轨迹功能。
3.选择合适的工具和坐标系,选择自动路径
4.在ROBOTSTUDIO*下方,选择合适的运动语句模板
5.选择合适的参照面(生成的点位会默认垂直于这个面,点位的X方向默认会沿着轨迹前进方向,这点很重要,后续批量收缩点位也是利用这个特性)
6. 点击“创建”。
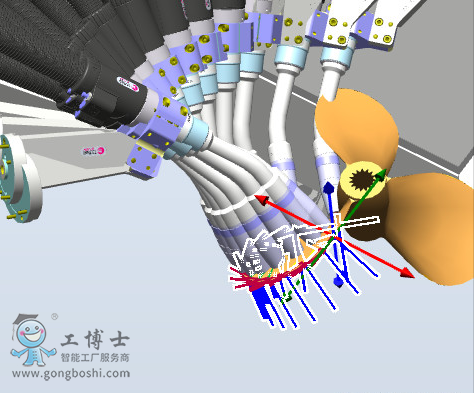
7. 可以通过右击点位,“查看目标处工具”,显示所有点位的工具姿态
8. 希望此时所有点朝产品中心收缩3mm(即轨迹收缩,离开边缘)。可以注意到此时所有点位的Y方向与前进的X方向垂直且指向产品中心。
9. 右击点位,选择“修改目标”,“设定位置”
10. 参考“本地”,并在Y方向输入3mm
11. 会发现所有点位已经收缩3mm
12. 此时所有点位姿态,如下图
13. 希望此时点位Z方向不变(即垂直于当前面),但x方向基本一致朝前(即避免运动过程机器人工具过度旋转),可以使用“对齐”功能
14. 选中需要“对齐”的点位,不要选中“要参考的点位”,点击“修改”下的“对准目标点方向”
15. 选择要参考的点位,默认z轴方向不点,x对准
了解更多内容请点击:ABB机器人配件
本文摘自:网络 日期:2020-03-17
- 下一篇:ABB机器人新示教器Touch Jog
- 上一篇:自定义HMI--运行程序控件
