

 联系我们
联系我们

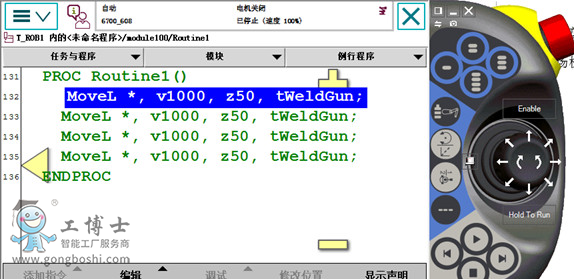
2. 现在希望轨迹能够调整顺序,即轨迹从后往前走,如何快速实现?
3. 可以借助robotstudio来实现
4. 在robotstudio创建系统并恢复现场轨迹
5. 点击上图中的同步到工作站,
6. 在基本视图下,找到对应的例行程序,右击
7. 选择反转路径
8. 再选择同步到rapid,即可
9. 在步骤7时,也可以右击选择重名目标点,批量把未命名的点位命名
了解更多内容请点击:ABB机器人配件
本文摘自:网络 日期:2020-03-23
