

 联系我们
联系我们

2)打开robotstudio,控制器下的配置编辑器下的addsignal
3)选择类型,输入base_name,选择assigned todevice(如果是虚拟信号,选择none),start Index(信号名称起始序号),Number of signal(配置的数量)真实信号选择device mapping Start(地址开始位),点击ok,然后重启
4)配置完效果如下图
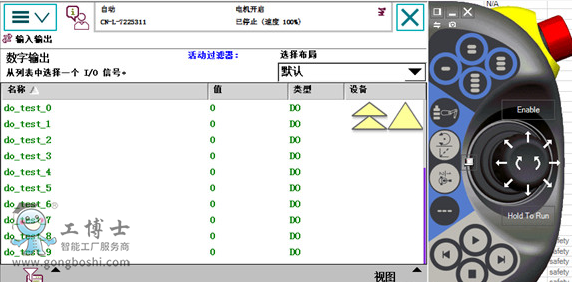
了解更多内容请点击:ABB机器人配件
本文摘自:网络 日期:2020-06-03
- 下一篇:ABB机器人故障流程解答
- 上一篇:ABB 喷涂机器人:互联雾化器RB1000i介绍
